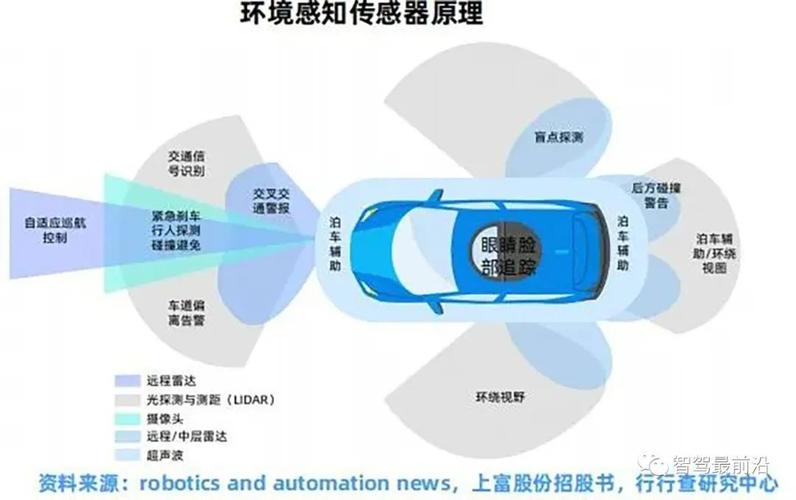
在科技飞速发展的今天,汽车自动驾驶技术已经成为了汽车行业的热门话题,而要实现真正的自动驾驶,传感器起着至关重要的作用,传感器就像是汽车的“眼睛”、“耳朵”和“鼻子”,能够感知周围的环境信息,为自动驾驶系统提供准确、可靠的数据支持,下面将介绍几种常见的汽车自动驾驶传感器及其应用。
激光雷达(LiDAR)
激光雷达是一种利用激光光束探测周围环境的传感器,通过发射激光束并测量光子飞行的时间来计算物体的距离和方向,激光雷达可以创建出车辆周围环境的三维地图,这种高精度的三维信息对于自动驾驶系统来说至关重要,它可以帮助汽车识别障碍物、行人和其他道路使用者,从而实现安全、高效的自动驾驶,激光雷达的成本较高,且容易受到恶劣天气的影响,如雨雪、雾霾等,在实际应用中,需要与其他传感器结合使用,以提高系统的鲁棒性和可靠性。
摄像头
摄像头是另一种常见的自动驾驶传感器,它们通常安装在车辆的前部、后部和侧面,用于捕捉道路、交通标志和其他车辆的图像,通过计算机视觉算法,这些图像可以被分析和处理,以识别道路标记、交通信号灯和其他重要信息,摄像头的优势在于成本较低,且分辨率较高,可以提供丰富的色彩和纹理信息,这使得它们成为自动驾驶系统中不可或缺的一部分,摄像头也有其局限性,如在强光或弱光条件下性能会下降,以及难以准确判断物体的三维位置,为了克服这些问题,通常会将摄像头与其他传感器结合使用,以实现更全面的环境感知。
毫米波雷达
毫米波雷达是一种可以感知障碍物并辅助自动驾驶的传感器,它通过发射和接收无线电波来检测前方的障碍物,即使在恶劣天气下也能保持正常工作,毫米波雷达可以提供前方180°的距离信息,这有助于自动驾驶汽车在行驶过程中避免碰撞,毫米波雷达还可以检测到车辆的速度和行驶方向,为自动驾驶系统提供更多的信息支持。
超声波雷达
超声波雷达是一种利用声波进行近距离感知的传感器,它通过发射和接收超声波来测量物体距离,适用于近距离检测,如停车时的障碍物检测和避免碰撞等场景,虽然超声波雷达的点云密度较低,但它可以通过级联等方式来增加点云密度,从而提高检测的准确性,在自动驾驶汽车中,超声波雷达通常与其他传感器结合使用,以提供更全面的环境感知信息。
惯性测量单元(IMU)
惯性测量单元是一种测量车辆运动的加速度和角速度的传感器,通过测量车辆运动的加速度和角速度,IMU可以提供关于车辆姿态和运动状态的信息,这对于自动驾驶系统来说非常重要,因为它可以帮助车辆确定自己的位置和方向,从而更好地规划行驶路径,IMU还可以与其他传感器(如GPS和车轮传感器)结合使用,以提高定位和导航的准确性。
汽车自动驾驶传感器在实现自动驾驶技术中扮演着关键角色,不同的传感器具有不同的特点和应用场景,通过合理地选择和组合这些传感器,可以为自动驾驶系统提供更加全面、准确的环境感知信息,这将有助于提高自动驾驶汽车的安全性和可靠性,为未来的智能出行提供有力保障。