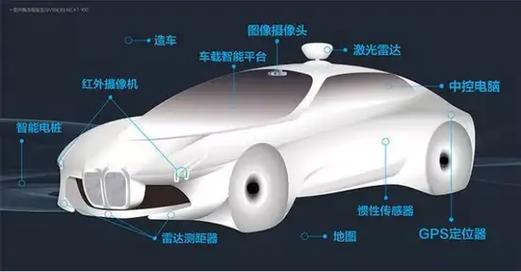
在智能交通日益发展的当下,汽车自动驾驶技术正以前所未有的速度迈向现实,这一前沿科技的核心在于一系列精密的传感器,它们宛如敏锐的触角,全方位感知车辆周围环境,为自动驾驶保驾护航,视觉传感器、雷达传感器、激光雷达等佼佼者,各展其长,共同构建起自动驾驶的感知基石。
一、视觉传感器:捕捉道路的“眼睛”
1、原理与构造
- 视觉传感器,如同车辆的“眼睛”,利用光学成像原理,将光线聚焦于图像传感器上,形成清晰的图像,这些图像传感器多为 CMOS(互补金属氧化物半导体)或 CCD(电荷耦合器件),它们由数百万个微小的像素点组成,每个像素都能记录光线的强度和颜色信息,当光线透过镜头照射到图像传感器上时,光子被像素吸收并转化为电信号,经过后续的处理和转换,最终形成数字图像。
- 为了获取更广阔的视野,一些高级的视觉系统会采用多个摄像头,分别安装在车辆的不同位置,如前挡风玻璃后视镜处、车身两侧以及车尾等,从而实现 360 度的全景监控,这些摄像头的视角和焦距各不相同,有的负责拍摄远处的道路场景,有的则专注于近距离的障碍物检测。
2、优势与应用
- 视觉传感器的优势在于能够提供丰富、直观的视觉信息,它可以识别各种交通标志、车道线、行人、车辆等,对于理解道路环境和交通状况具有至关重要的作用,在高速公路行驶中,视觉传感器能够准确地识别前方车辆的距离和速度,判断是否有足够的安全距离进行变道;在城市道路上,它可以轻松识别交通信号灯的颜色和状态,确保车辆按照交通规则行驶。
- 视觉传感器还具有良好的分辨率和色彩还原能力,能够在各种光照条件下工作,随着技术的不断进步,一些新型的视觉传感器还具备了高动态范围(HDR)和低光照性能增强功能,即使在强光直射或黑暗的夜晚,也能清晰地捕捉到道路场景。
3、面临的挑战
- 视觉传感器也并非完美无缺,在恶劣的天气条件下,如大雨、大雪、浓雾等,其性能可能会受到一定的影响,雨水或雪花可能会模糊镜头,导致图像质量下降;浓雾则会散射光线,使能见度降低,强烈的阳光直射可能会造成阴影和反光,干扰对物体的识别和判断。
二、雷达传感器:探测障碍物的“雷达眼”
1、原理与构造
- 雷达传感器通过发射电磁波,通常是毫米波或微波频段的无线电波,然后接收目标反射回来的回波来工作,当雷达波遇到障碍物时,一部分能量会被反射回来,而另一部分则会继续传播,通过测量发射信号和接收信号之间的时间差,可以计算出障碍物与车辆之间的距离,根据多普勒效应,还可以确定障碍物相对于车辆的相对速度。
- 毫米波雷达是汽车自动驾驶中常用的一种雷达传感器,它通常工作在 77GHz 或 79GHz 的高频段,这些雷达天线体积小巧,可以方便地集成在车辆的外观部件中,如保险杠、格栅或车顶等位置,它们能够提供高精度的距离和速度测量数据,并且不受光线和天气条件的影响。
2、优势与应用
- 雷达传感器在障碍物检测和速度测量方面具有独特的优势,它可以在各种天气条件下稳定工作,无论是白天还是夜晚,无论是晴天还是雨雪天气,都能准确地探测到前方的障碍物,在自适应巡航控制(ACC)系统中,毫米波雷达可以实时监测前方车辆的速度和距离,自动调整车辆的巡航速度,保持安全的跟车距离。
- 雷达传感器还可以用于盲点检测和侧向辅助,安装在车辆两侧的雷达能够监测后方侧向车道的车辆,当有车辆进入盲区时,及时发出警报提醒驾驶员,在一些高级的自动驾驶系统中,雷达传感器还可以与其他传感器融合使用,实现更高级的驾驶辅助功能。
3、面临的挑战
- 尽管雷达传感器具有很多优点,但它也存在一些局限性,毫米波雷达的波束宽度相对较窄,对于一些小体积或远距离的物体检测能力有限,而且,雷达波容易受到周围环境中其他物体的反射和干扰,如建筑物、桥梁等,这可能会导致误判或漏检。
三、激光雷达:构建三维地图的“精准画笔”
1、原理与构造
- 激光雷达(LiDAR)是一种通过发射激光束并测量反射光的时间来获取距离信息的传感器,它通常由激光发射器、扫描装置和接收器组成,激光发射器产生一束极短脉冲的激光,当激光照射到物体上时,部分激光会被反射回来并被接收器接收,通过测量激光脉冲发射和接收之间的时间间隔,可以精确计算出激光雷达到物体的距离,扫描装置则负责控制激光束的方向和角度,使其能够对周围环境进行全面扫描。
- 激光雷达可以快速地生成大量的三维空间点云数据,这些点云数据能够准确地反映周围物体的形状、位置和大小,通过对点云数据进行处理和分析,可以构建出详细的三维地图,为自动驾驶车辆提供高精度的环境感知。
2、优势与应用
- 激光雷达的优势在于其极高的测量精度和分辨率,它能够提供厘米级的三维空间分辨率,这对于识别道路上的障碍物、行人以及交通标志等具有非常重要的意义,在自动驾驶中,激光雷达可以用于障碍物检测、动态障碍物跟踪、环境重建等多个方面,在复杂的城市交通环境中,激光雷达能够准确地识别出行人、自行车和其他车辆的位置和运动轨迹,为车辆的决策和控制提供可靠的依据。
- 激光雷达还可以与其他传感器融合使用,进一步提高环境感知的准确性和可靠性,将激光雷达与视觉传感器相结合,可以利用视觉传感器提供的丰富色彩和纹理信息,对激光雷达的点云数据进行分类和标注,从而更好地理解周围环境。
3、面临的挑战
- 激光雷达的成本相对较高,这在一定程度上限制了其在汽车自动驾驶领域的广泛应用,激光雷达在恶劣天气条件下的性能也会受到影响,如大雨、大雪、浓雾等天气会导致激光信号的衰减和散射,从而降低其探测距离和精度。
汽车自动驾驶传感器中的视觉传感器、雷达传感器和激光雷达各有千秋,它们在各自的领域发挥着不可替代的作用,随着技术的不断发展和完善,这些传感器将继续相互协作、优势互补,共同推动汽车自动驾驶技术向着更加安全、可靠、高效的方向发展,为未来的智能交通带来无限可能。