本文目录导读:
在科技日新月异的今天,自动驾驶技术作为汽车行业未来发展的重要方向,正逐渐改变着我们的出行方式,而汽车自动驾驶传感器作为实现这一技术的关键环节,其重要性不言而喻,它们就像汽车的“眼睛”和“耳朵”,为汽车提供周围环境的信息,帮助汽车做出正确的决策。
常见类型
摄像头
- 工作原理:基于光学原理工作,通过光学透镜捕捉光线,并将其聚焦在图像传感器上,图像传感器由许多小的光敏元件(像素)组成,每个像素负责测量特定区域的光强度,将光学信息转换为数字图像数据。
- 在自动驾驶中的作用:能够捕捉车辆周围的视觉信息,包括道路、车辆、行人、道路标志和交通信号等,经过计算机视觉技术处理,可用于识别和分类各种对象,进行车道保持、交通信号识别和目标跟踪等,为自动驾驶系统的实时感知和决策提供重要依据。
- 面临的挑战与解决方案:在黑夜、雨雪、大雾等能见度低的情况下,识别率会大幅降低,可通过使用更高分辨率的摄像头、改进图像处理算法以及与其他传感器融合来提高性能。
毫米波雷达
- 工作原理:通过发射无线电信号并接收反射信号来测定与物体间的距离,其频率通常介于 10~300GHz 频域之间,根据多普勒效应,还可以测量物体的速度和角度等信息。
- 在自动驾驶中的作用:具有导引头体积小、质量轻和空间分辨率高、穿透雾、烟、灰尘的能力强等优点,常用于汽车的盲点监测、变道辅助以及探测车距和前车速度,是实现主动刹车、自适应巡航等功能的基础。
- 面临的挑战与解决方案:元器件成本高,加工精度相对要求高;探测角度小;雨、雾和湿雪等高潮湿环境的衰减、树丛穿透能力差,未来可通过技术改进降低成本,优化设计以提高探测角度和在不同环境下的性能。
激光雷达
- 工作原理:向目标发射激光束,然后将接收到从目标反射回来的回波与发射信号进行比较,经过计算分析后获得目标的距离、方位、高度、速度、姿态、甚至形状等参数信息。
- 在自动驾驶中的作用:能够以高深度和角度分辨率进行深度感知,生成物体的三维点云图,包含物体的位置和形状信息,广泛应用于障碍物检测、动态障碍物跟踪和环境重建等方面,为自动驾驶系统提供精确的环境模型。
- 面临的挑战与解决方案:价格相对较高,且在某些恶劣天气条件下性能可能会受到影响,随着技术的发展和规模化生产,成本有望逐渐降低;可结合其他传感器数据,利用算法提高其在复杂环境下的可靠性。
超声波传感器
- 工作原理:基于声波的传播和回声原理工作,发射高频率声波(通常在20kHz到65kHz之间),声波遇到物体后被反射回传感器,通过测量发射声波和反射声波之间的时间延迟来计算物体到传感器的距离。
- 在自动驾驶中的作用:主要用于近距离检测,如泊车辅助中的障碍物检测和避免碰撞等场景,成本相对较低,且不受光线条件的影响。
- 面临的挑战与解决方案:精度相对较低,作用距离有限,可通过与其他传感器配合使用,发挥各自的优势,弥补其不足。
多传感器融合
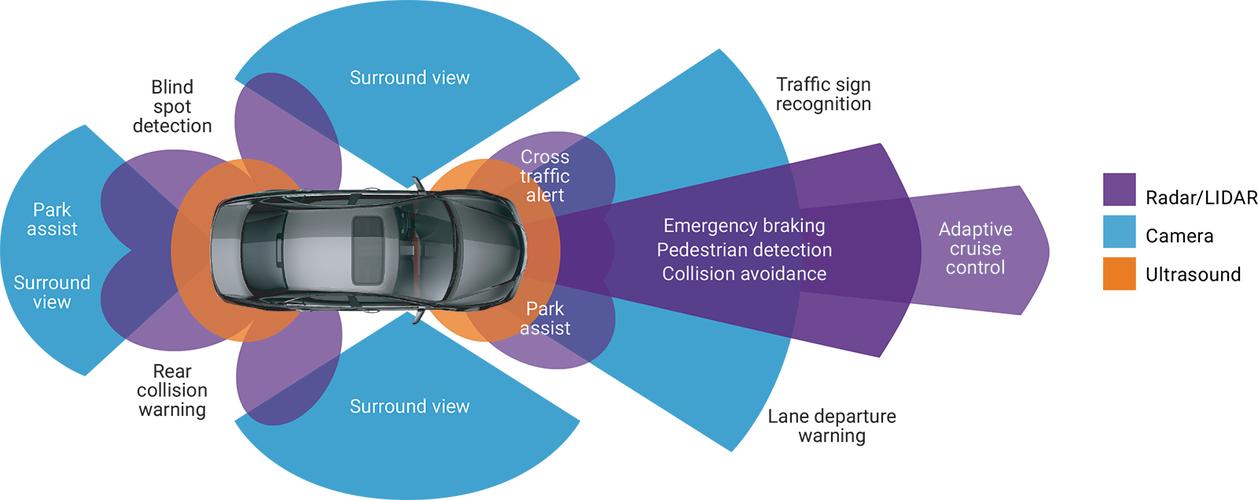
由于不同类型传感器存在局限性,多传感器融合成为必然趋势,通过整合来自多个传感器的数据,可以弥补各自传感器在感知能力上的不足,提高整体感知的准确性和可靠性,在复杂的城市交通环境中,摄像头可以识别交通标志和信号灯的颜色与形状,毫米波雷达能精准测量前方车辆的速度与距离,而激光雷达则可绘制出周围障碍物的三维轮廓,将这些信息融合起来,自动驾驶系统就能更全面地了解路况,做出更合理的决策。
汽车自动驾驶传感器是实现自动驾驶技术的基石,各类传感器的不断发展与融合,将为自动驾驶的普及和应用奠定坚实基础,尽管目前仍面临一些挑战,但随着技术的持续进步,相信这些问题都将逐步得到解决,未来的自动驾驶汽车将更加安全、可靠、智能,为人们的出行带来前所未有的便利和体验。