本文目录导读:
随着汽车工业的不断发展,驾驶安全和舒适性成为人们关注的焦点,自适应巡航作为一项先进的驾驶辅助系统,正逐渐在中高级轿车上得到广泛应用,它通过雷达、摄像头等传感器,实时感知周围环境并调整车辆速度和行驶状态,为驾驶者提供更加轻松安全的驾驶体验,本文将对汽车自适应巡航进行全面介绍,包括其工作原理、系统组成、发展趋势以及未来展望。
自适应巡航的工作原理
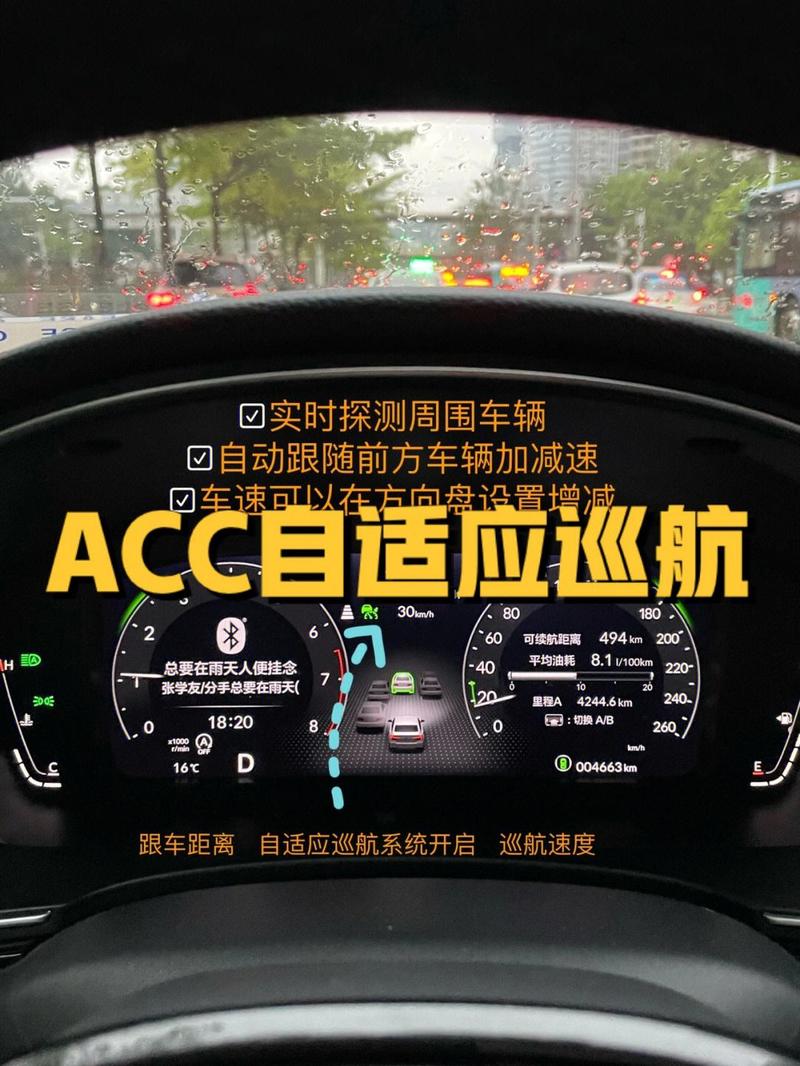
自适应巡航控制系统(ACC)是一种智能化的自动控制系统,它通过安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号,当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
具体来说,自适应巡航可以自动控制车辆的加速和减速,以保持与前车的安全距离,当前方有车时,系统会自动跟着前车行驶;当前方没车时,系统会按驾驶员预先设定的速度行驶,这种智能化的控制方式不仅提高了驾驶的舒适性,还大大提高了行车安全性。
自适应巡航的系统组成
自适应巡航的系统组成主要包括以下几个部分:
1、传感器:包括雷达、摄像头等,用于感知周围环境和前车的位置、速度等信息。
2、电子控制单元(ECU):接收传感器传来的信号,并根据预设程序进行分析和判断,然后发出相应的指令来控制车辆的加速和减速。
3、执行器:根据ECU的指令,执行具体的操作,如调整油门开度、刹车力度等。
自适应巡航的控制策略
自适应巡航的控制策略主要分为以下几种:
1、基于规则的控制:根据传感器传来的信息,按照预设的规则进行判断和处理,当与前车的距离小于某个阈值时,系统自动采取制动措施。
2、基于模型的控制:建立数学模型来描述车辆的动态行为,并通过模型预测和优化来实现自适应巡航,这种方法通常需要大量的实验数据来进行验证和调整。
3、基于机器学习的控制:利用机器学习算法对大量的驾驶数据进行学习和训练,以实现自适应巡航的智能化控制,这种方法能够更好地适应复杂的交通环境和驾驶场景。
自适应巡航的发展趋势
随着科技的进步和消费者需求的变化,自适应巡航技术也在不断发展和完善,未来的发展趋势主要包括以下几个方面:
1、智能化:未来的自适应巡航将更加注重智能化,通过引入更多的传感器和算法,提高系统的感知能力和决策能力,结合高精度地图和定位系统,实现更精准的导航和自动驾驶功能。
2、集成化:自适应巡航技术可能会与其他汽车电子系统相互融合,形成智能汽车电子控制系统,在卫星导航系统的指引下,利用环境感知技术和网络通信技术,实现自动驾驶功能。
3、网络化:自适应巡航技术也将朝着网络化方向发展,通过车联网技术,实现车辆之间的信息共享和协同控制,提高交通效率和行车安全性。
自适应巡航的应用前景
自适应巡航技术在智能驾驶和智能交通系统中具有广阔的应用前景,它不仅可以提高驾驶的安全性和舒适性,还可以减少交通拥堵和事故发生率,随着技术的不断进步和成本的降低,自适应巡航有望在未来几年内得到更广泛的应用和推广。
汽车自适应巡航是一项具有重要意义的技术革新,它通过智能化的控制方式,实现了车辆的自动加速和减速,提高了驾驶的安全性和舒适性,未来,随着技术的不断发展和完善,自适应巡航将在智能驾驶领域发挥更加重要的作用,让我们共同期待这一技术为我们的出行带来更多便利和安全!